Wat is een encoder en welke soorten zijn er?
Encoders zijn sensoren die worden gebruikt om een hoekverdraaiing, toerental, lineaire positie of afgelegde weg te bepalen. De eerste twee worden gebruikt voor het meten van roterende bewegingen, de laatste twee voor het meten van translerende bewegingen. Het aantal meetprincipes is gering, maar er zijn veel verschillende uitvoeringen en ze worden in allerlei branches gebruikt.
Verschil absolute encoders en incrementele encoders
Een belangrijk onderscheid is er naar absolute encoders (codegevers) en incrementele encoders (pulsgevers). De eerste geven altijd exact de hoek van de as ten opzichte van het nulpunt. De tweede tellen vanaf de vorige positie en moeten bij elk nieuw gebruik eerst naar het nulpunt worden teruggebracht.
Het uitgangssignaal van een encoder kan in het geval van een absolute encoder per positie van de as bestaan uit een uniek binair code. In het geval van een incrementele encoder is de uitgang een reeks elkaar snel opvolgende pulsen (blokgolven). Voor de uitlezing bestaan verschillende protocollen. Zo worden bij incrementele encoders overwegend HTL of TTL signalen gebruikt, bij absolute encoders SSI, Biss of een veldbussysteem zoals EtherCAT, Ethernet, Profibus etc. Ook de naam hoekopnemer wordt gebruikt.
Voor een hogere resolutie kan een sinus- en een cosinussignaal worden gebruikt in plaats van een blokgolf. Deze encoders worden ook wel sincos-encoders genoemd kenmerkend voor deze encoder is de absolute positie die per omwenteling wordt verkregen. Veelal worden de sincos encoder toegepast om de positie van rotor en stator te optimaliseren om zodoende meer rendement uit een motor te halen.
Dankzij miniaturisering in de elektronica kunnen de signalen al in de encoder zelf worden omgezet naar een signaal dat gemakkelijker leesbaar is voor besturingen, regelaars en displays. Voorbeelden zijn RS422, CANopen, IO-Link, Profinet, Profibus, Ethernet, EtherCAT, Ethernet/IP of analoge signalen zoals 0-10 V of 4-20 mA.
Mechanisch gezien onderscheiden we holle as en volle as encoders. De eerste worden bevestigd aan of geïntegreerd in behuizingen van roterende apparaten zoals elektromotoren, tandwielkasten, pompen, enzovoorts. Holle as encoders worden over een roterende as geschoven volle as encoders worden met een koppeling vastgezet. Er zijn encoders leverbaar voor de meest uiteenlopende asdiameters. Tegen meerprijs zijn veel applicatie-specifieke encoders leverbaar: ATEX, roestvast staal, heavy duty, zonder lagers, stroom-isolerend, met veiligheidsfuncties, voor liften, voor de off-shore, voor windturbines, voor de voedingsmiddelen- en drankenindustrie, enzovoorts. Sommige encoders hebben programmeerbare functies zoals resolutie en draairichting.
Belangrijkste meetprincipes van encoders
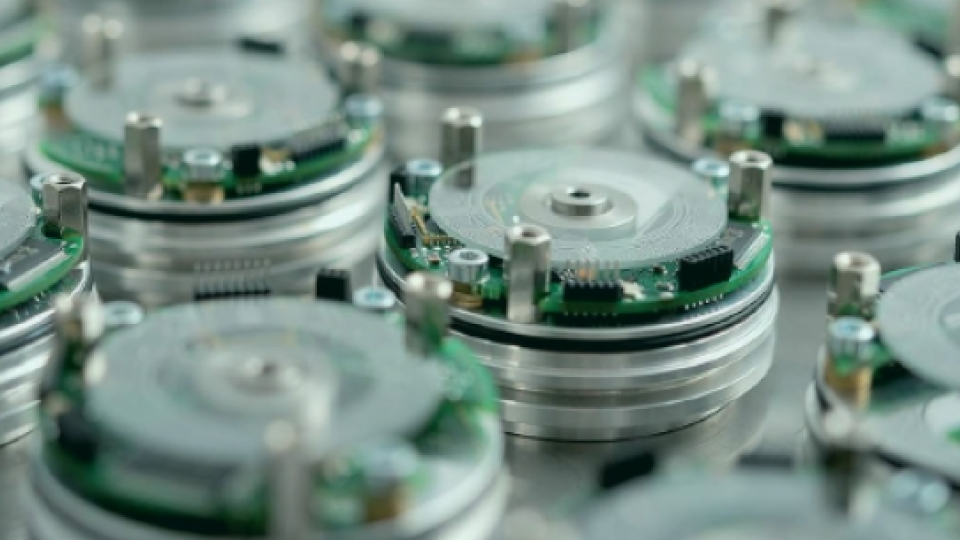
Qua meetprincipe zijn magnetische en optische encoders de belangrijkste types. Bij beide principes bevat het instrument een schijf met coderingen, die worden uitgelezen door respectievelijk een magneet en een fotocel. De schijf is in vast contact met de as en roteert; de uitleeseenheid heeft een vaste positie. Er zijn hoge resoluties mogelijk; afhankelijk van merk, type en uitvoering ligt dat tussen 14-bit (214 = ongeveer 16.400 pulsen per omwenteling) en 19-bit (zo'n 525.000 pulsen per omwenteling). Tegenwoordig zijn er zelfs al 25 bit encoders met een resolutie van ruim 3,55 miljoen coderingen per rotatie mogelijk.
De schijf van een optische encoder is gemaakt van glas of kunststof, met transparante en ondoorzichtige gebieden. Een lichtbron en fotodetector array leest op elk moment het optische patroon dat resulteert uit de positie van de schijf. Vaak wordt bij een absolute encoder de zogeheten Gray- code gebruikt.
De magnetische encoder gebruikt een reeks magnetische polen om de positie van de encoder weer te geven voor een magnetische sensor (Hall-effect) die de magnetische poolposities leest. Door hun principe kunnen deze encoders functioneren in omstandigheden waar andere typen encoders kunnen falen als gevolg van temperatuurwisselingen (condensvorming). Magnetische encoders zijn ook relatief ongevoelig voor trillingen, kleine uitlijnfouten of schokken.
Minder gangbaar zijn capacitieve en mechanische encoders. Binnen capacitieve encoders draait een asymmetrisch gevormde schijf. De schijf verandert de capaciteit tussen twee elektroden; het verschil kan worden gemeten en teruggerekend tot een hoekwaarde. Het metalen patroon is zo ontworpen dat elke positie van de as een unieke binaire code creëert. Terwijl de schijf met de as draait, raken sommige plekken op de metalen schijf een contact, terwijl op andere plaatsen het contact is verbroken. Omdat de contacten gevoelig zijn voor slijtage, zijn deze encoders niet gebruikelijk. Ze zijn te vinden in toepassingen met lage snelheid.
Verschillende soorten encoders
Voor de vele toepassingen zijn verschillende soorten encoders beschikbaar. De belangrijkste benoemen we hieronder. Op Products4Engineers vind je een ruim aanbod aan lineare en roterende encoders.
Lineaire encoders
Lineaire encoders, ook wel lengtemeetsystemen genoemd, worden gebruikt voor de meting van de lineaire verplaatsing. U kunt denken aan de slag van cilinders op kranen, laadschoppen, bulldozers, sluizen, hefbruggen en dergelijke, maar ook in portaalrobots, scanners en gereedschapmachines. De sensoren kunnen uitwendig of inwendig worden aangebracht. Uitwendig is goedkoper, maar in de bedrijfsomgeving kwetsbaarder en gevoelig voor vervuiling. Vaak wordt hier een kabel gebruikt, die via een katrol is verbonden met een roterende encoder. Inwendig is duurder, maar minder kwetsbaar en nauwkeuriger en vergt minder onderhoud. Vaak wordt hier gebruik gemaakt van het optische of het magnetostritieve meetprincipe.
Incrementele encoders
Een incrementele encoder geeft bij draaiing een pulstrein af. De pulsen worden geteld en omgezet naar een rotatiehoek (of een translatie-afstand). Door twee pulstreinen te gebruiken (A, B) die 90° in fase zijn verschoven, kan de elektronica van de encoder uit de pulstreinen ook de draairichting afleiden. Daarnaast is er vaak nog een derde signaal dat een enkele puls geeft op 0 graden (Z of C). In veel encoders is van deze signalen ook de inverse aanwezig (A, /A, B, /B, Z, /Z). Een incrementele encoder meldt onmiddellijk positieveranderingen, wat in sommige toepassingen essentieel mogelijkheid is. Het instrument houdt geen absolute positie bij.
Absolute encoders
Een single-turn absolute encoder geeft altijd de exacte positie van de as weer. De codering begint na iedere omwenteling van de encoder-as weer op nul. Er zijn single-turn encoders, die over 360° informatie over de positie geven. Dit type encoder wordt vaak gebruikt voor het bepalen van een hoek (in graden). Er zijn ook encoders die over meerdere omwentelingen meten; we spreken dan van een absolute multiturn-encoder. Een dergelijke sensor bevat extra codewielen en overbrengingen. Een schijf met hoge resolutie meet de hoekverdraaiing, wielen met een lagere resolutie registreren het aantal hele omwentelingen van de as eigenlijk te vergelijken met een uurwerk uren, minuten seconden.
Een absolute encoder houdt positie-informatie bij, als de spanning van de encoder wordt uitgeschakeld. De juiste positie van de encoder is daardoor onmiddellijk beschikbaar bij het inschakelen van de spanning. Het systeem hoeft niet terug te keren naar een nulpunt om zijn uitgangspositie te bepalen. Absolute encoders zijn doorgaans duurder dan incrementele.
Resolvers
Roterende encoders zijn het digitale maar duurdere alternatief voor de analoge resolver, een roterende elektrische transformator. Resolvers kunnen een nauwkeurige analoge conversie uitvoeren van polaire naar rechthoekige coördinaten. Ze produceren een sinus- en cosinus-feedbackstroom, maar voor de positiebepaling worden vaak resolver-naar-digitaal-converters gebruikt. Deze zetten het sinus- en cosinus-signaal om in een binair signaal (10 bit tot 16 bit breed) dat gemakkelijker door een controller of display kan worden gebruikt. Omdat de prijzen van encoders dalen en ze meer mogelijkheden bieden, vervangen ze de resolvers steeds meer.
Zoek ook op: