SIGMATEK ontwikkelt open AGV-wagenparkbeheersysteem
Het TCS (Traffic Control System) van SIGMATEK is een open AGV-wagenparkbeheersysteem dat onafhankelijk van voertuigfabrikant werkt en de gestandaardiseerde VDA 5050-interface gebruikt voor communicatie tussen het voertuig en de hoofdbesturing. Dit maakt de integratie van AMR’s (Autonome Mobiele Robots) van verschillende fabrikanten mogelijk.
Het TCS voert de planning uit en houdt rekening met alle mogelijke routes, eenrichtingsverkeer, permanente of tijdelijke obstakels of door de gebruiker gedefinieerde beperkingen. De zogenaamde digitale transformatie kan alleen de gewenste resultaten opleveren als de automatisering van productie-installaties alomvattend is. Naast de machines zelf moet dit ook de robots en handlingapparaten omvatten, evenals de volledige transporttechniek.
Intralogistiek automatiseren
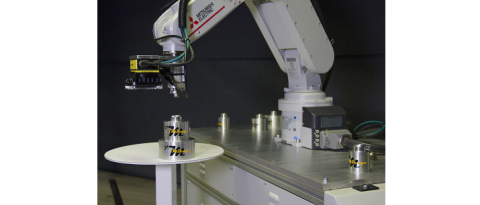
Automatisch geleide voertuigen (AGV's) en AMR’s spelen een sleutelrol bij het flexibeler maken van productieprocessen voor de implementatie van adaptieve productiestrategieën. Ze vervangen steeds vaker de voorheen gangbare installaties, omdat ze gemakkelijk kunnen worden aangepast aan veranderende eisen, processen en transportroutes.

SIGMATEK introduceert hardware onafhankelijke softwareproducten voor de automatisering van de intra logistiek. Eén daarvan is dus het open AGV fleet management systeem TCS. Het maakt gebruik van de gestandaardiseerde VDA 5050-interface voor communicatie tussen het voertuig en het besturingssysteem. Op deze manier maakt TCS het mogelijk om AMR’s te integreren in gezamenlijke AGV's, ongeacht hun merk en hun verbinding met de omliggende IT- en automatiseringssystemen.
Grenzen aan de navigatie vrijheid
Laten we uitgaan van navigatietaken die worden uitgevoerd door een AGV. Daarbij volgt deze gedefinieerde routes, die vaak worden afgeleid uit fleet management systemen. Het stoppen van de route wordt gecontroleerd door middel van verschillende navigatieprocedures. Tevens wordt op contour gebaseerde lasernavigatie steeds belangrijker, waarvoor geen kunstmatige oriëntatiepunten nodig zijn.
Er wordt ook gebruik gemaakt van 2D-laserscanners die nodig zijn voor de veiligheid van het voertuig. Deze kunnen op verschillende hoogten worden gemonteerd, om de omgeving te scannen en de eigen positie te bepalen op basis van bekende factoren. Idealiter zijn de scanners zo gemonteerd dat statische kenmerken detecteerbaar blijven. Productie- en opslagfaciliteiten zijn geen starre landschappen met vaste contouren. Daarnaast zijn zaalplannen vaak onvolledig. Zelfs wanneer transportrekken anders zijn gepositioneerd dan voorheen, bereikt op contour gebaseerde navigatie zijn grenzen.
Continu aanpassen aan de realiteit
Van belang bij de ‘SLAM’ navigatieprocedure (voor gelijktijdige positiebepaling en mapping): in de loop van de navigatie nemen AMR's de omgevingskenmerken over en maken de kaart dynamisch. "Daarbij ontstaat een kip-en-eiprobleem: om de kaart te maken, heeft het voertuig een perfecte plaatsbepaling nodig, maar lokalisatie heeft ook invloed op de landkaart", vertelt Otto Koller, hoofd beeldverwerkingssystemen bij SIGMATEK. "Daarom moeten beide processen gelijktijdig in elkaar grijpen."

Revolutionaire AMR-Navigation
Daarnaast zijn er voertuigen die gebruikt kunnen worden om te navigeren door middel van SLAM. De kwestie is zowel wiskundig als software technisch een enorme uitdaging, die niet alle AMR-fabrikanten aankunnen. Dit is niet de reden waarom er aanzienlijke verschillen zijn in de kwaliteit van de implementatie van bestaande oplossingen.
Net als in het geval van TCS onderkende SIGMATEK de behoefte aan een open SLAM-oplossing voor eenvoudige integratie in een AMR door de fabrikant, ongeacht de gebruikte besturingstechnologie. Het ambitieuze doel was om een systeem te creëren dat binnen enkele minuten klaar is voor gebruik, geen vooraf geïnstalleerde plannen vereist en zeer nauwkeurig is, zelfs met sterk veranderde contouren. En de software moet een lage vereiste voor hardware bronnen hebben. De box-pc waarop deze draait, mag immers niet veel ruimte of stroom verbruiken in het voertuig.
Nauwkeurig de voertuigpositie bepalen
De realtime locatiesoftware ‘SIGMATEK SlamLoc’ herdefinieert de manier waarop AMR’s omgaan met veranderingen in hun omgeving tijdens de op contour gebaseerde navigatie. Tijdens de eerste run maakt SlamLoc een kaart van de omgeving als basis voor routeplanning.
Als een vreemd object tijdens een verdere reis wordt gedetecteerd, wordt dit meegenomen en gebruikt voor de positiebepaling. Op deze manier kan de houding, dat wil zeggen de X/Y-coördinaat inclusief oriëntatie, waarop het voertuig zich bevindt, veel nauwkeuriger worden bepaald dan mogelijk zou zijn door simpelweg te extrapoleren met behulp van de aandrijfgegevens.

Zaklamp voor een AMR
"SlamLoc stelt de mobiele robot in staat om compromisloos precies te navigeren, zelfs als hij bijvoorbeeld door volle planken of pallets de contouren van de hal niet meer ziet", vertelt Koller, die het ruim twee jaar durende ontwikkelingsproject leidde. "Het is als een zaklamp die de nachtelijke wandelaar details laat zien die een kaart en het kompas alleen hem niet kunnen bieden."
Volledige vrijheid voor variabele omgevingen
Voor dit doel kunnen geautoriseerde gebruikers afzonderlijke delen van de kaart bewerken die door het voertuig zijn gemaakt en functies handmatig verwijderen. Op deze manier is het ook mogelijk om volledig variabele gebieden te creëren waarin alleen zaken zoals de muren of hellingbanen als vaste punten in het plan overblijven. De variabele positie van de planken en pallets worden vervolgens dynamisch door het voertuig geregistreerd, ieder keer wanneer het voertuig deze passeert. Door bewust het gebruik van bekende contouren te vermijden, kunnen bufferzones, goederen ontvangst of verzending voor het eerst in een AGV met SlamLoc worden geïntegreerd.